中国教育在线
中国教育在线



北理工黄强教授荣获国际机构学和机器科学联合会(IFToMM)“卓越成就奖”
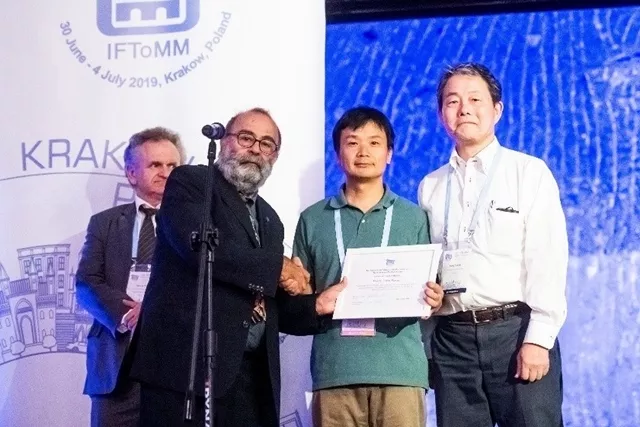
IFToMM主席Marco Ceccarelli教授(前排左一)为黄强教授(前排左二)颁奖
近期,国际机构学和机器科学联合会(International Federation for the Promotion of Mechanism and Machine Science, 简写IFToMM)第十五届世界总会(15th IFToMM World Congress)在波兰历史名城克拉科夫召开。本届大会上,北京理工大学黄强教授被授予IFToMM“卓越成就奖”(Award of Merit)。颁奖词指出黄强教授“在仿人机器人和空间机器人的机构设计、运动规划、平衡控制和系统集成方面做出了杰出贡献,在机器人领域产生了非常重要的影响,大力推动了机器人科技发展”。
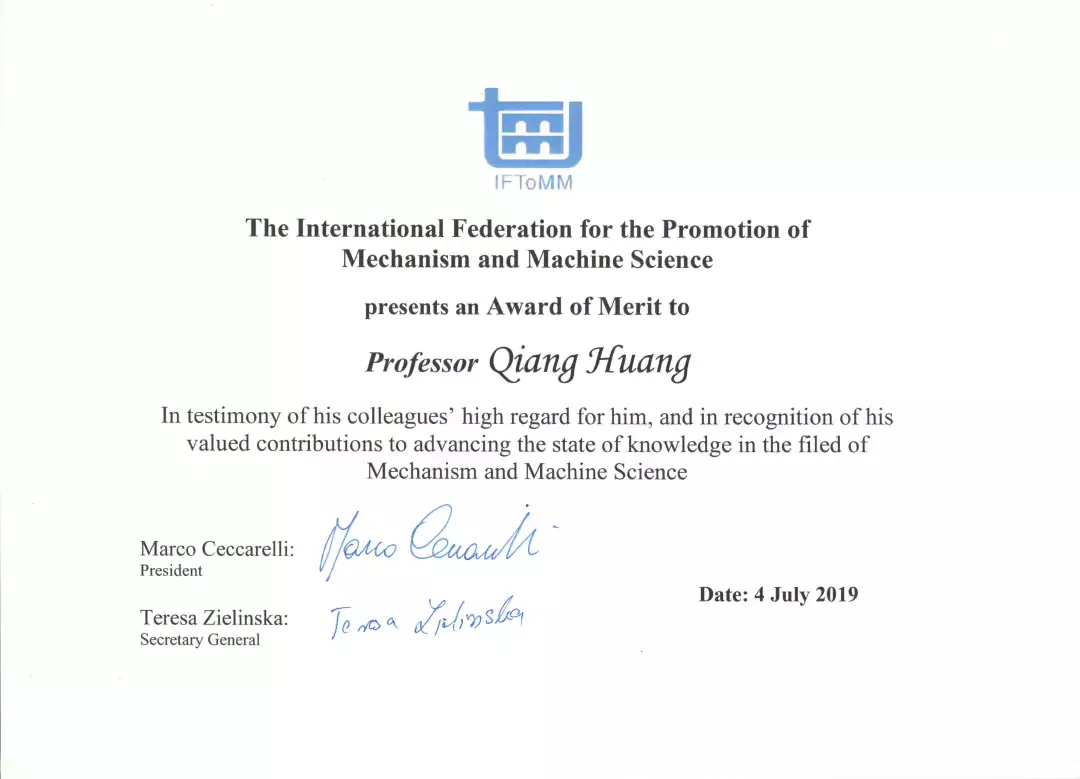
IFToMM于1965年成立于波兰,至今有50余年历史。IFToMM“卓越成就奖”颁发给为推动机构与机械科学领域的知识状态做出了卓越贡献的科学家。本次黄强教授是该奖唯一获得者,目前全世界仅有13位杰出科学家获此殊荣。
IFToMM是机构学和机器科学领域重要的国际学术组织,现有50个国家或地区会员,遍及全球科技领先国家,下设计算运动学、齿轮传动、机器人学、人机系统、连杆与凸轮、机电一体化、微型机械、非线性振动、可靠性、运输机械、多体动力学和摩擦学等13个技术委员会。

黄强教授课题组部分成员合影
不忘初心
黄强1991年赴世界仿人机器人研究水平领先的日本早稻田大学留学,师从被誉为“世界仿人机器人之父”的著名学者加藤一郎教授,正式踏上对仿人机器人前沿领域的钻研之路。之后在日本通商产业省工业技术院、东京大学从事仿人机器人研究工作。2001年引进回国,从起初的“一杆枪”、“零条件”干到如今以黄强教授核心、中青年副教授为骨干、研究生为科研创新主力、工程师为技术保障的40余人学术梯队,并拥有教育部重点实验室、高精尖创新中心、科技部重点领域创新团队、国防科技创新团队等高水平平台支撑。
勇于创新

“汇童”5代机器人
国际上仿人机器人研究者一直围绕稳定行走、跑、跳等单一模态运动开展研究,尽可能增强其稳定性,防止其摔倒,因为一旦摔倒,机器人将无法运行,损失大。仿人机器人“刚柔兼备”的行走、爬行、翻滚、摔倒保护等多模态运动是一个公认难题。行走、跑、跳等运动需要刚劲有力,爬行、翻滚、摔倒保护等需要柔性。仿人机器人自由度多、参数多、运动模态多、强非线性,引入柔性后参数更多,机器人结构和控制难上加难。黄强教授十几年保持做不一样的仿人机器人研究的初心,另辟蹊径,借鉴人类具有“摸爬滚打”的复杂环境多模态运动适应能力,研究仿人机器人的“摔滚走爬”多模态运动,机器人除了具有稳定的行走功能外,还具备意外情况下摔倒不损坏,遇到障碍了走不过去爬过去、滚过去的功能,使机器人能够顽强到达目的地执行任务。
不断探索
未来黄强教授及其团队还将继续研究增强仿人机器人的运动动态性能,并且增加更多的运动模态,如攀爬、跳跃等,使机器人能够适应环境复杂的大千世界。
① 凡本站注明“稿件来源:中国教育在线”的所有文字、图片和音视频稿件,版权均属本网所有,任何媒体、网站或个人未经本网协议授权不得转载、链接、转贴或以其他方式复制发表。已经本站协议授权的媒体、网站,在下载使用时必须注明“稿件来源:中国教育在线”,违者本站将依法追究责任。
② 本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者在两周内速来电或来函联系。